

322
.pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования Воронежская государственная лесотехническая академия
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Тема Кинематический расчет плоского механизма
Методические указания и контрольные задания для студентов специальностей 250301, 150405, 190601
Воронеж 2006
2
УДК 531.2 Иевлева, О.Б. Теоретическая механика. Тема Кинематический расчет
плоского механизма [Текст] : методические указания и контрольные задания для студентов специальностей 250301, 150405, 190601 / О.Б. Иевлева, В.А. Гулевский, Л.М. Кречко ; Фед. агентство по образованию, Гос. образовательное учреждение высш. проф. образования, Воронеж. гос. лесотехн. акад. – Воронеж, 2006. – 16 с.
Печатается по решению редакционно-издательского совета ВГЛТА
Рецензент заведующий кафедрой высшей математики и теоретической механики ВГАУ, д-р техн. наук, проф. В.П. Шацкий
Научный редактор заведующий кафедрой сопротивления материалов и теоретической механики ВГЛТА, д-р техн. наук, проф. В.И. Харчевников
3
Цель предлагаемого задания – выработка навыков кинематического расчета плоских механизмов и контроль усвоения следующих тем курса теоретической механики, необходимых для выполнения задания:
1)поступательное движение твердого тела;
2)вращательное движение твердого тела;
3)плоское движение твердого тела.
Предлагаемые в данном задании механизмы выбраны из собрания Артоболевского И.И. "Механизмы в современной технике" т.2.
Номер варианта в этих заданиях определяется двумя последними цифрами шифра, при этом по последней цифре выбирается номер схемы (рис.3.0–3.9), а по предпоследней цифре – угол φ поворота кривошипа АВ (табл. 1).
Таблица 1
№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
φ, град. |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
|
|
|
|
|
|
|
|
|
|
|
Кривошип АВ вращается равномерно с угловой скоростью ωАВ =3 рад/с. В задании следует:
1)выбрать масштаб длин по ГОСТу и начертить схему механизма в положении, определяемом заданным углом ϕ;
2)для этого положения механизма с помощью плана скоростей найти скорости всех указанных точек, средней точки звена ВС и угловую скорость звена ВСD;
3)проверить правильность найденных значений с помощью мгновенного центра скоростей;
4)применяя теорему об ускорениях точек плоской фигуры, найти ускорения тех же точек и угловое ускорение звена ВСD построением многоугольников ускорений;
5)найти мгновенный центр ускорений звена ВСD, используя ускорение точки В, угловую скорость и угловое ускорение звена ВСD.

4
Замечание. При выполнении п.3 и п.5 необходимые расстояния до мгновенного центра скоростей (ускорений) следует измерять на чертеже.
Пример выполнения задания
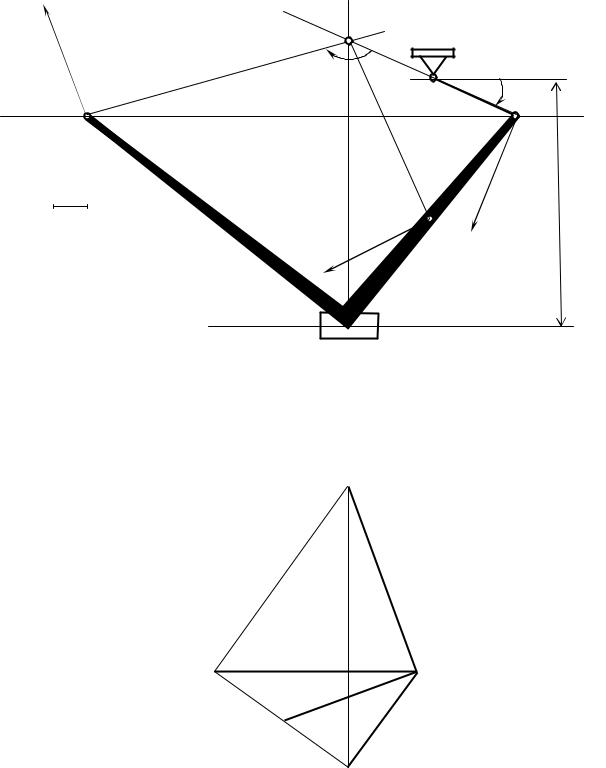
На рис.1а изображена схема механизма (№ 1554, И.И. Артоболевский "Машины и механизмы в современной технике", т. II) в заданном положении, когда ϕ=300.
Размеры звеньев механизма следующие: АВ=140мм; ВС=4·АВ=560 мм; СD=5,25·АВ=735 мм; ВD=7,1·АВ=994 мм; а=3,25·АВ=455 мм.
Кривошип АВ вращается с постоянной угловой скоростью ωАВ =5 с-1.
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК И УГЛОВЫХ СКОРОСТЕЙ ЗВЕНЬЕВ ПРИ ПОМОЩИ ПЛАНА СКОРОСТЕЙ
Кривошип АВ совершает вращательное движение, поэтому скорость точки В VB АВ и определяется по формуле
VB = ωАВ · AB =5·140=700 мм/с = 0,7 м/с.
Для построения плана скоростей (рис. 1б) выбирается масштаб скоростей. Построение плана скоростей основано на теореме о скоростях точек плоской фигуры
VC =VB +V C(B) ,
где V C(B) СВ; VC(B)=ωВСD·CB.
Итак, из точки О (рис. 1,б) откладываем отрезок, параллельный VB и равный ему по модулю с учетом масштаба. Конец этого отрезка обозначаем буквой b (Ob =VB ).
Через точку О проводим прямую, параллельную направляющим ползуна С, так как по ней направлена скорость точки VC . Из точки b на плане проводим прямую, перпендикулярную СВ на чертеже (параллельную V C(B) ) до пересечения с прямой, по которой направлена VC , и ставим точку c. Получаем
VC =Oc ; V C(B) = bc .
|
5 |
VD |
Р |
|
|
ωBCD |
D |
φ |
|
B
200 мм/с |
|
а |
|
|
|
А |
М |
VВ |
|
|
VС 
C
Рис. 1а. План положения механизма. Определение скоростей точек при помощи мгновенного центра скоростей
|
d |
c |
o |
|
m |
|
b |
|
Рис. 1б. План скоростей |

6
Чтобы найти скорость точки D, на плане проводим через точку b прямую, перпендикулярную BD (параллельную V D(B) ), и через точку с – перпендикуляр CD (параллельно V D(C) ). На пересечении этих перпендикуляров ставим точку d.
Тогда получаем
VD = 0d ; V D(B) = bd ; V D(C) = cd .
Для нахождения скорости точки М, которая делит пополам отрезок ВС, воспользуемся вторым свойством плана
BMbm = CMcm = ωВСD,
то есть находим точку m – середину отрезка bc.
Тогда VM = 0m .
Итак, план построен. Измеряя найденные скорости и учитывая масштаб, получаем следующие результаты:
VC=0c= 940 мм/c = 0,94 м/c; VD=0d= 950 мм/c = 0,95 м/c; VM=0m= 700 мм/c = 0,7 м/c.
Угловая скорость шатуна ВС может быть найдена из соотношений
ωВСD = |
bc |
= |
cd |
= |
bd |
. |
BC |
CD |
|
||||
|
|
|
BD |
|||
Измеряя bc, cd, bd, имеем |
||||||
bc=840 мм/c; cd= 1100 мм/c; bd= 1500 мм/c. |
||||||
Тогда |
ωBCD =840/560 =1,5 c-1; ωBCD =1100/735 =1,5 c-1; |
|||||
ωBCD =1500/994=1,5c-1 .
Итак, все три формулы дали приблизительно один и тот же результат: ωBCD =1,5 c-1 .

7
ПРОВЕРКА НАЙДЕННЫХ СКОРОСТЕЙ С ПОМОЩЬЮ МГНОВЕННОГО ЦЕНТРА СКОРОСТЕЙ (МЦС)
Мгновенным центром скоростей (МЦС) плоской фигуры называется точка, неизменно связанная с фигурой, скорость которой в рассматриваемый момент времени равна 0.
Скорости всех точек фигуры таковы, как будто фигура вращается вокруг МЦС, то есть они перпендикулярны отрезкам, соединяющим точки с МЦС, и имеют модули, пропорциональные длинам этих отрезков.
Известны направления скоростей точек В и С. МЦС звена ВС лежит на пересечении перпендикуляров к скоростям точек В и С, проведенных из этих точек. Обозначим эту точку Р (рис. 1,а).
|
Тогда скорости всех точек определяются как во вращательном движении |
|
вокруг МЦС |
|
|
|
VB= ωBCD ·BP; |
VC= ωBCD ·CP; |
|
VD= ωBCD ·DP; |
VM= ωBCD ·MP. |
|
Необходимые для всех этих вычислений расстояния измеряются на чертеже |
|
механизма: ВР=460 мм, СР=620 мм, DР=630 мм, МР=460 мм. |
||
|
По известной скорости точки В легко найти угловую скорость шатуна: |
|
|
ωBCD = VB /BP= 700/460= 1,52 c-1. |
|
Тогда |
VC= ωBCD ·CP= 1,52·620= 942 мм/c; |
|
|
VD= ωBCD ·DP= 1,52·630= 953 мм/c; |
|
|
VM= ωBCD ·MP= 1,52·460= 699,2 мм/c. |
|
|
Полученные значения достаточно близки к тем, что найдены по плану |
|
скоростей. |
|
|
|
Направлены скорости точек по перпендикулярам к отрезкам, соединяющим |
|
точки с МЦС, в сторону вращения, на которое указывает направление VB (в данном случае – по часовой стрелке).

8
ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ ТОЧЕК МЕХАНИЗМА
Ускорение точки B, принадлежащей вращающемуся кривошипу, находим следующим образом:
aB = aτB + aBn , |
|
|
|
|
где aτ = ε |
·АВ= 0, так как ω |
АВ |
=const; |
|
B |
АВ |
|
|
|
aBn =·ω2АВ·АВ=52·140= 3500 мм/c2= 3,5 м/c2. |
||||
Итак, вектор aB |
направлен по АВ к точке А (рис. 2). |
|||
Точка С движется по прямой, и по этой прямой направлено ее ускорение
aC .
Используем теорему об ускорениях точек плоской фигуры, принимая за полюс точку В:
aC =aB + aCn (B) + aτC(B) .
800 мм/с2 |
r |
||||
|
|
|
|
|
aB |
|
|
|
|
|
|
D |
|
|
|
|
φ |
|
|
|
|
|
|
rn |
|
|
|
β |
B |
aC(B) |
|
|
|
|
|
|
|
r |
|
|
εBCD |
β |
|
aM |
|
|
|
|
Q |
|
М |
VВ |
|
r |
|
|
|
||
|
|
|
|
||
aB |
|
|
|
r |
|
|
|
β |
|
aCτ |
(B) |
|
|
|
|
|
r |
|
r |
aD |
C |
aС |
|
|
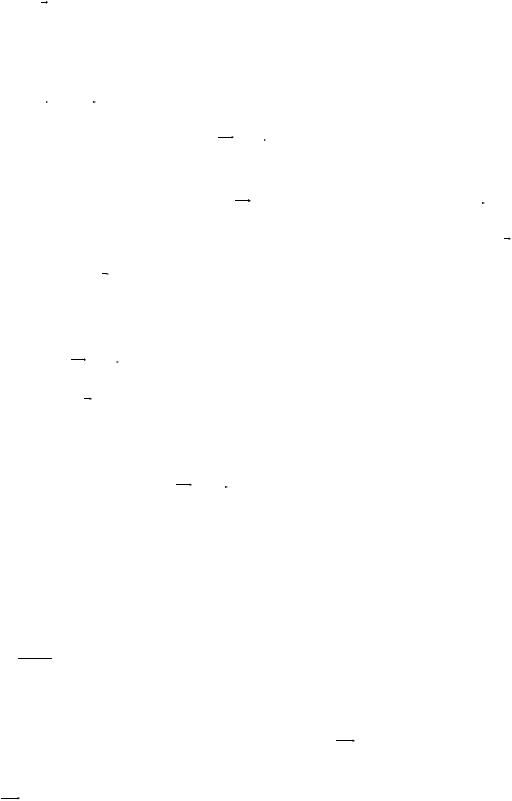
Рис. 2. Ускорения точек механизма. Мгновенный центр ускорений
9
Вектор aCn (B) направлен по СВ к точке В и равен по модулю aCn (B) =ωBCD2 CB,
то есть aCn (B) = 1,502·560= 1260 мм/c2= 1,26 м/c2.
Вектор aτC(B) aCn (B) и равен по модулю aCτ (B) = εBCD CB, но εBCD неизвестно. Для определения неизвестных aC и aτC(B) строим многоугольник ускорений. Выбираем масштаб ускорений (рис. 2).
Из точки С откладываем вектор aB , из его конца откладываем aCn (B) ( || ВС), из конца последнего проводим пунктирную прямую, перпендикулярную aCn (B) . Это
направление вектора aτC(B) .
Из точки С проводим пунктирную прямую, по которой направлено ускорение точки С. В точке пересечения этих пунктирных прямых находятся
концы ускорений aC и aτC(B) .
Направление aτC(B) показывает, что дуговая стрелка εBCD направлена против часовой стрелки, то есть противоположно вращению звена BCD (рис. 1). Таким образом, вращение звена BCD является замедленным.
Измерение построенных aC и aτC(B) позволяет, учитывая масштаб, найти их модули
aC = 480 мм/c2= 0,48 м/c2. aCτ (B) = 3680 мм/c2= 3,68 м/c2.
Тогда по формуле для aCτ (B) легко найти
εBCD= aCτ (B) = 3680 = 6,6 с-2.
CB 560
Ускорение средней точки М отрезка ВС легко найти, используя следствие 2 из теоремы об ускорениях точек в плоском движении (3, §96).
Согласно этому следствию, конец ускорения aM точки М лежит в середине отрезка, соединяющего концы ускорений точек В и С.
Проводя aM и измеряя, находим aM = 1560 мм/c2= 1,56 м/c2.
10
НАХОЖДЕНИЕ МГНОВЕННОГО ЦЕНТРА УСКОРЕНИЙ (МЦУ) ЗВЕНА ВСD И УСКОРЕНИЯ ТОЧКИ D
Мгновенным центром ускорений плоской фигуры называется точка, неизменно связанная с фигурой, ускорение которой равно 0 в рассматриваемый момент времени.
Ускорения точек плоской фигуры таковы, как будто фигура вращается вокруг МЦУ, то есть ускорения составляют с отрезками, соединяющими точку с
МЦУ, угол β=arctg |
ε |
|
, модули ускорений пропорциональны длинам этих |
|
ω |
2 |
|||
|
|
|||
|
|
|
||
отрезков. |
|
|
|
Найдем угол β, который образуют ускорения точек с отрезками, соединяющими эти точки с МЦУ
β=arctg |
εBCD |
= arctg |
|
6,57 |
= arctg 2,93=700 7'. |
|
ω 2 |
1,522 |
|||||
|
|
|
||||
|
BCD |
|
|
|
|
|
Повернем найденные ускорения точек В и С на угол β в направлении, |
||||||
указанном дуговой стрелкой εВСD (рис. 2). Точка Q пересечения лучей, по которым направлены повернутые ускорения, и есть МЦУ звена ВСD.
Можно применить и другой способ: вдоль повернутого на угол β ускорения точки В отложить отрезок
BQ= |
|
aB |
|
= |
|
3500 |
|
= 500 |
мм. |
|
|
|
|
|
|
|
|||||
εBCD2 +ωBCD4 |
6,62 +1,524 |
|||||||||
|
|
|
|
|
|
|
|
Измерение на рис. 2 расстояния ВQ дает близкий результат: BQ=490 мм. Используя МЦУ, легко найти ускорение точки D. По чертежу находим:
DQ=690 мм. Тогда
aD = DQ 
 εBCD2 +ωBCD4 = 690
εBCD2 +ωBCD4 = 690 
 6,62 +1,524 = 4830 мм/c2= 4,83 м/c2.
6,62 +1,524 = 4830 мм/c2= 4,83 м/c2.
Отложив угол β от отрезка DQ в направлении, противоположном εВСD, получим направление вектора aD .
Замечание. Ускорение точки D можно найти и по теореме об ускорениях точек плоской фигуры, приняв за полюс любую из точек звена BCD, ускорение которой было найдено. Лучшей является точка В, так как ускорения остальных точек находились с потерей точности.