

Лекции / Лекция 33 Пуск и торможение ДПТ, специальные МПТ
.pdfПуск и торможение ДПТ, специальные МПТ
Способы и условия пуска двигателей постоянного тока. При пуске двигателя n 0 ЭДС, наводимая в обмотке якоря, равна нулю, а ток в соответствии с уравнением (5.2) равен
Iaп |
U |
. |
(5.15) |
|
|||
|
R |
|
|
|
a |
|
|
Поскольку сопротивление цепи якоря Ra |
невелико, то при |
||
пуске с номинальным напряжением U Uном ток якоря в 10..50 раз
будет превышать свое номинальное значение. Такой ток недопустим ни для щеток (из-за чрезмерных плотностей тока и сильного искрения под ними), ни для обмоток (из-за больших электродинамических усилий, пропорциональных квадрату тока якоря), ни для сети (из-за больших падений напряжения в ней). Кроме того, поскольку пропорционально росту тока возрастает электромагнитный момент двигателя, то большой момент может привести к поломке узла, соединяющего вал двигателя и приводимого механизма. По допустимым условиям работы коллекторно-щеточного узла пусковой ток ограничен
Iaп (2..2,5)Ia ном .
Поэтому прямой пуск (прямое включение в сеть) допускается только для двигателей малой мощности с относительно большим сопротивлением цепи якоря. Для более мощных двигателей необходимо уменьшать пусковой ток до указанных выше значений. Достигнуть этого можно или снижением подводимого напряжения, или включением последовательно с обмоткой якоря добавочного активного сопротивления (пускового реостата).
Пуск при пониженном напряжении можно осуществить, если двигатель подключен к отдельному регулируемому источнику постоянного тока. В этом случае напряжение источника при включении двигателя плавно увеличивают, что позволяет избежать больших толчков тока. Начальное напряжение при пуске выбирается так, чтобы в первый момент пуска n 0 ток в цепи якоря Iaп (2..2,5)Ia ном .
Пуск с помощью пускового реостата. Максимальное значение сопротивления пускового реостата выбирается так, чтобы в первый момент пуска n 0 ток в цепи якоря Iaп (2..2,5)Ia ном . По мере разгона двигателя растет наводимая в его обмотке ЭДС, вследствие чего
ток якоря будет уменьшаться. Поэтому по мере разгона двигателя сопротивление пускового реостата постепенно уменьшают, а когда частота вращения достигнет установившегося значения – выводят полностью Rп 0 , поскольку пусковые реостаты по условиям охлаждения
рассчитаны на кратковременное протекание тока. Этот способ пуска имеет наибольшее распространение.
Условия пуска двигателей независимого, параллельного и смешанного возбуждения. Первым условием является ограничение пускового тока одним из двух рассмотренных способов.
Второе условие вытекает из требования минимального времени пуска. Для этого, как следует из уравнения движения, необходимо максимизировать пусковой момент. Увеличить пусковой момент Mп
при ограниченном значении тока Iaп можно только за счет увеличе-
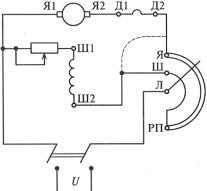
ния магнитного потока . Поэтому вторым условием пуска является требование пуска при максимальном токе возбуждения. Для этого при пуске обмотку возбуждения включают на полное напряжение сети и полностью выводят регулировочный реостат Rв (см. рис. 5.10).
По этой же причине нельзя включать эту обмотку так, как показано штриховой линией на рис. 5.10, т.е. после пускового реостата РП. В начальный момент пуска напряжение, подводимое к двигателю, уравновешивается падением напряжения в цепи якоря и в пусковом реостате
Так как сопротивление пускового реостата Rп Ra ,
то на цепь якоря и параллельную обмотку возбуждения будет приходиться небольшая часть напряжения сети (10..20 %), поэтому ток возбуждения и магнитный поток будут малы, что приведет к значительному снижению электромагнитного момента. И, если пуск производится с нагрузкой на валу, то может оказаться, что Mп Mc , и двигатель не придет во вращение.
При пуске на холостом ходу Mc 0
ка будет сильно возрастать частота вращения (двигатель пойдет вразнос), что также является недопустимым.
Условия пуска двигателя последовательного возбуждения.
Первым условием является ограничение пускового тока одним из двух рассмотренных способов. Если ограничение тока осуществляется с помощью пускового реостата, то схема последнего оказывается проще приведенной на рис. 5.10, так как в этом случае он содержит всего два зажима - Л (к нему подключается один из сетевых зажимов) и Я (к нему подключается цепь якоря). Зажима Ш, к которому подключалась параллельная обмотка возбуждения, в этом случае не требуется.
Как следует из формулы (5.12), при заданном максимальном пусковом токе Iaп пусковой момент становится максимально возмож-
ным, т.е. второе условие пуска двигателей независимого (параллельного) возбуждения в этом случае выполняется автоматически при соблюдении первого условия. При пуске вхолостую ток якоря и, следовательно, магнитный поток по мере разгона двигателя будут уменьшаться и стремиться к нулю. В результате этого частота вращения будет сильно увеличиваться – двигатель пойдет вразнос.
Поэтому второе условие пуска – запрещение пуска двигателя без нагрузки. Обычно пуск можно проводить, если Mc 20..30%Mном .
Способы изменения направления вращения (реверса). На-
правление вращения якоря двигателя в установившемся режиме работы совпадает с направлением электромагнитного момента, направление которого определяется по правилу левой руки.
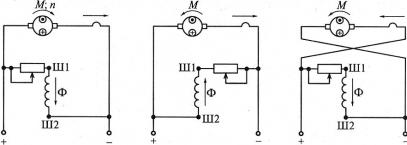
На рис. 5.11 направление тока в обмотке якоря показано точками и крестиками, а потока возбуждения - стрелками. На рис. 5.11, а при заданном направлении тока якоря и потока возбуждения электромагнитный момент и скорость двигателя направлены по часовой стрелке. Если поменять полярность подводимого напряжения, как показано в скобках, то ток якоря и поток возбуждения изменят свое направление, но направление момента и скорости останутся теми же.
Ia |
Ia |
Ia |
а б в Рис. 5.11. Схемы включения обмоток двигателя в рабочем режиме (а)
и при реверсировании посредством изменения направления тока возбуждения (б) и полярности напряжения, подводимого к цепи якоря (в):
Ш1, Ш2 – выводы обмотки параллельного возбуждения
Поэтому направление момента и, следовательно, направление вращения якоря можно изменить, изменяя или направление магнитного потока при сохранении направления тока якоря, или направление тока в обмотке якоря при сохранении направления магнитного потока.
Для этого необходимо поменять местами или выводы обмотки возбуждения (рис. 5.11, б), или полярность подводимого к цепи якоря напряжения (рис. 5.11, в). При изменении направления магнитного потока в двигателях смешанного возбуждения для того, чтобы не нарушать согласное действие обмоток, следует поменять между собой концы подводящих проводников как параллельной, так и последовательной обмотки,
В начальный момент реверса при изменении направления потока возбуждения скорость скачком измениться не может, а ЭДС обмотки якоря изменяет свой знак. Для этого момента времени уравнение равновесия для цепи якоря в соответствии с уравнением (5.2) имеет вид
U E Ia Ra .
Отсюда получаем начальное значение тока якоря при реверсе
Iaп |
U E |
. |
(5.16) |
|
|||
|
R |
|
|
|
a |
|
|
Из уравнения (5.16) следует, что ток якоря Iaр 2Iaп при пря-
мом пуске. Поэтому для ограничения тока при реверсе в цепь якоря необходимо включать реостат, сопротивление которого вдвое больше сопротивления пускового реостата. По мере уменьшения скорости до нуля и далее при изменении направления вращения ЭДС будет уменьшаться, а затем изменять свой знак. Соответственно будет уменьшаться и ток якоря. Это позволяет уменьшать сопротивление реостата для сохранения максимально допустимого тока, т.е. для ускорения реверса путем сохранения максимального электромагнитного момента в процессе реверса.
В начальный момент реверса при изменении полярности подводимого к цепи якоря напряжения скорость скачком измениться не может, и ЭДС обмотки якоря сохраняет свой знак. Для этого момента времени уравнение равновесия для цепи якоря в соответствии с уравнением (5.2) имеет вид
U E Ia Ra .
Отсюда следует, что ток якоря Iaр 2Iaп . Поэтому, как и в
предыдущем случае, необходимо принимать меры по его ограничению.
Способы торможения двигателей постоянного тока. Для того чтобы быстро остановить или уменьшить скорость механизма, приводимого во вращение электродвигателем, наряду с механическими применяются и электрические способы торможения. Сущность электрических способов торможения состоит в том, что электрическая машина в этот период из двигательного режима переводится в один из тормозных и, следовательно, создает электромагнитный момент, направленный против направления вращения.
В случае машин постоянного тока применяют три способа электрического торможения: динамическое, рекуперативное и торможение противовключением. При динамическом торможении машина работает в режиме автономного генератора, при рекуперативном торможении
– в режиме генератора, работающего параллельно с сетью, при торможении противовключением в режиме электрического тормоза. Рассмотрим более подробно эти способы торможения.
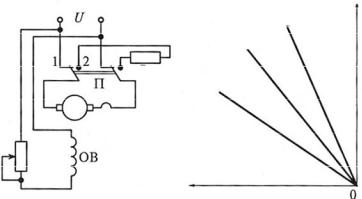
Динамическое торможение. В этом режиме цепь якоря двигателя замыкают на внешнее активное сопротивление Rдт для чего пе-
реключатель П из положения 1 переводят в положение 2 (см. рис. 5.27,
а).
n
|
Rд.т.3 Rд.т.2 |
Rд.т |
Rд.т.2 Rд.т.1 |
|
Rд.т.1 0 |
а |
Ia( M) |
б |
Рис. 5.27. Схема динамического торможения (а) и механические (скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения в данном режиме
Обмотка параллельного (независимого) возбуждения на все время торможения остается включенной в сеть, и якорь по инерции будет продолжать вращаться в том же направлении. Поэтому ЭДС в обмотке якоря не изменяет свой знак. Ток якоря в исходном (двигательном) режиме был равен Ia U E / Ra . После отключения якоря от сети
U 0 и замыкании его на активное сопротивление |
Rдт ток будет |
|||||||
равен |
|
|
|
|
|
|
||
Ia |
E |
|
|
c1n |
|
. |
|
|
Ra Rдт |
Ra Rдт |
|
||||||
|
|
|
|
|
||||
Тогда электромагнитный момент будет равен |
|
|||||||
|
|
|
|
cc n 2 |
|
|
|
|
|
M cIa |
1 |
. |
|
(5.18) |
|||
|
|
Ra Rдт |
|
|||||
|
|
|
|
|
|
|
||
Как видно из выражения (5.18) электромагнитный момент M изменяет свой знак, т.е. становится тормозным. Выбор величины сопротивления Rдт определяется ограничениями на величину тока яко-
ря. Если пренебречь размагничивающим действием реакции якоря, то из этого выражения следует, что механические характеристики двигателя в режиме динамического торможения будут линейными и будут выходить из начала координат (см. рис. 5.27, б).
Недостатком этого способа торможения является то, что при малых частотах вращения машина не развивает достаточного тормозного момента.
Рекуперативное торможение. Рекуперативное торможение будет происходить в том случае, когда у двигателя, подключенного к сети с напряжением U , скорость n превысит скорость идеального
холостого хода nou . При этом ЭДС обмотки якоря E станет больше
напряжения U ток в якоре изменит свое направление. Машина перейдет в генераторный режим работы параллельно с сетью и будет создавать тормозной момент.
В этом режиме кинетическая энергия привода преобразуется в электрическую энергию, отдаваемую генератором постоянного тока в сеть. Этот способ торможения служит не для остановки привода, а для его подтормаживания, что характерно для работы подъемных устройств при спуске груза и для электрического транспорта при движении под уклон.
У двигателей последовательного возбуждения рекуперативное торможение осуществить невозможно, так как у них скорость идеального холостого хода равна бесконечности и, следовательно, ЭДС не может быть больше приложенного напряжения. Если все же необходимо осуществить рекуперативное торможение, то обмотку возбуждения переключают на питание от отдельного источника по схеме независимого возбуждения.
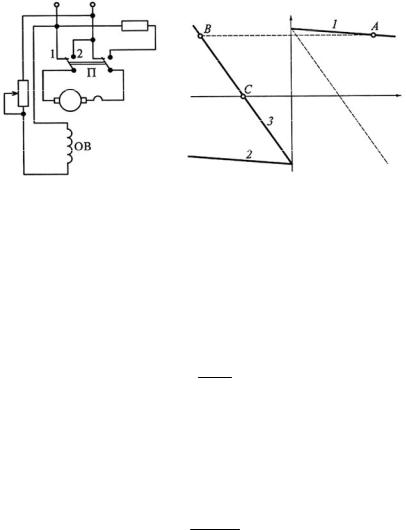
Торможение противовключением. Схема перевода двигателя в режим противовключения показана на рис. 5.28, a .
|
Rпр |
n |
|
|
|
|
|
Rпр 0 |
|
|
Ia(M) |
|
|
Rпр 0 |
а |
|
б |
Рис. 5.28. Схема торможения противовключением (а) и три механические (скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения в данном режиме
В исходном состоянии переключатель П находится в положении 1 и подключает цепь якоря к напряжению сети U . Предположим, что двигатель работает в режиме, которому соответствует точка А механической (скоростной) характеристики 1, показанной на рис. 5.28, б. В этой точке частота вращения равна n , а ток якоря
U E Ia Ra .
Для перехода в режим торможения противовключением изменяют полярность подводимого к якорю напряжения (переключатель П из положения 1 переводят в положение 2). После переключения вследствие механической инерции скорость n и ЭДС E не изменяются ни по значению, ни по знаку (направлению). Если сопротивление Rдт 0 , то
ток якоря после переключения станет равным
Ia U E ,
Ra
т.е. примерно вдвое будет превышать ток при прямом пуске двигателя. Для ограничения тока в цепь якоря включают резистор Rпр , как и в
случае реверса, изменением полярности напряжения якоря. Тогда новая механическая характеристика приобретет вид прямой 3 (см. рис.
5.28, б). Прямая 2 – естественная механическая характеристика, соответствующая Rпр 0.
При переводе переключателя из положения 1 в положение 2 машина из точки А переходит на работу в точку В характеристики 3. При переходе в точку В ток якоря изменяет свое направление и создаваемый им момент станет тормозным. Под действием этого момента скорость n будет уменьшаться до полного останова машины (точка С). Если необходимо только остановить двигатель, то в этот момент времени машина должна быть отключена от сети, иначе она перейдет в двигательный режим и якорь начнет разворачиваться в противоположную сторону. Торможение противовключением может применяться для всех типов двигателей постоянного тока.
Специальные машины постоянного тока. Исполнительные двигатели постоянного тока. В схемах автоматики и телемеханики наряду с исполнительными двигателями переменного тока широкое распространение получили исполнительные двигатели постоянного тока.
К положительным качествам этих двигателей, способствующим их широкому применению в различных схемах, можно отнести следующие: они позволяют получать теоретически любые – сколь угодно малые и большие скорости вращения; дают возможность просто, плавно и экономично регулировать скорость вращения в широком диапазоне; устойчиво работают при любых скоростях вращения; имеют линейные механические и в большинстве случаев регулировочные характеристики; не имеют самохода; по габаритам и массе значительно (в 2.. 3 раза) меньше асинхронных исполнительных двигателей переменного тока; обладают значительным пусковым моментом и в ряде конструкций сравнительно небольшой постоянной времени.
Основным недостатком коллекторных двигателей постоянного тока, ограничивающим область их применения, является наличие коллектора и щеток, т.е. скользящих контактов.
Непостоянство переходного сопротивления скользящих контактов приводит к нестабильности характеристик двигателя. Искрение под щетками ведет к подгоранию контактов (коллектора и щеток), к загрязнению двигателя, к необходимости систематического ухода за ним; не позволяет устанавливать двигатели нормального исполнения во взрывоопасных помещениях. Коллектор и щетки, являясь источником радиопомех, требуют для их подавления специальных фильтров.
Усилители постоянного тока, необходимые для работы коллекторных исполнительных двигателей постоянного тока, обычно более
сложны, чем усилители переменного тока, применяемые в схемах с исполнительными двигателями переменного тока.
Коллекторные исполнительные микродвигатели постоянного тока по их конструкции можно разделить на исполнительные двигатели обычного исполнения, исполнительные двигатели с гладким беспазовым якорем и малоинерционные исполнительные двигатели.
Одним из недостатков исполнительных двигателей постоянного тока обычного исполнения, которые были рассмотрены ранее, является то, что они имеют массивный якорь с большим моментом инерции, что значительно снижает их быстродействие. С целью уменьшения электромеханической постоянной времени начали выпускаться малоинерционные исполнительные двигатели постоянного тока.
Малоинерционные двигатели в зависимости от конструкции и технологии изготовления их якоря можно разделить на две группы:
а) малоинерционные двигатели с печатной обмоткой якоря; б) малоинерционные двигатели с обычной обмоткой якоря.
По своим пусковым и рабочим свойствам эти двигатели близки друг к другу.
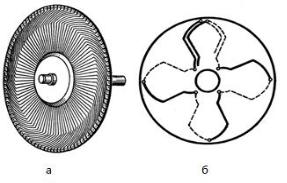
Малоинерционные двигатели с печатной обмоткой якоря. Эти двигатели в настоящее время изготовляются в двух конструктивных вариантах: с дисковым и с цилиндрическим якорем.
Рис. 6.1
Дисковый якорь (рис. 6.1, а) выполняется в виде тонкого диска из изоляционного материала, например стеклотекстолита, на обе стороны которого, обычно электрохимическим путем, наносятся соединяющиеся между собой части плоской (печатной) обмотки. Проводники