

1. Способы задания закона движения точки. Законом механического движения любого тела и в частности точки называется функциональная зависимость положения тела или точки от времени. Закон движения точки может быть представленным в трех формах: векторной, координатной и естественной. При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета. При координатном способе задания движения задаются координаты точки как функции времени: При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна.
2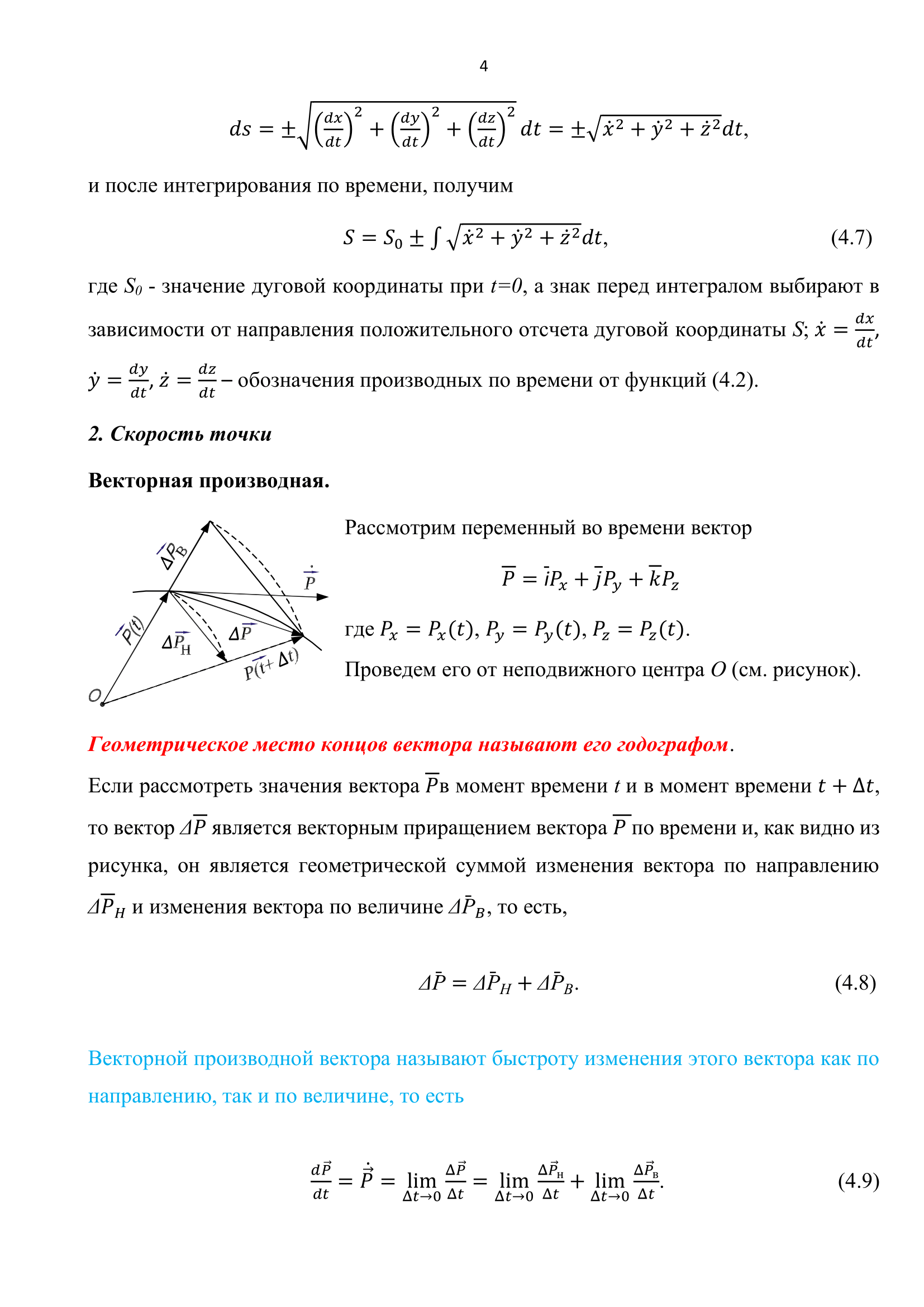 .
Векторная производная.
Векторной
производной вектора называют быстроту
изменения этого вектора как по
направлению,
так
и по
величине,
то
есть
.
Векторная производная.
Векторной
производной вектора называют быстроту
изменения этого вектора как по
направлению,
так
и по
величине,
то
есть
 Геометрически
векторная производная вектора 𝑃
– это
вектор, направленный
по касательной
к годографу
вектора 𝑃.
Геометрически
векторная производная вектора 𝑃
– это
вектор, направленный
по касательной
к годографу
вектора 𝑃.
векторная производная геометрической суммы двух векторов равна геометрической сумме/разности производных этих векторов:
векторная производная скалярного или векторного произведения двух векторов равна сумме соответствующих произведений производной первого вектора на второй вектор и первого вектора на производную второго вектора:
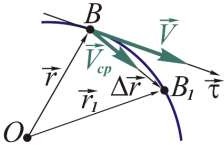
3. Скорость точки. Скоростью точки в данный момент времени называют быстроту перемещения точки в данный момент времени
Скорость 𝑉 точки равна производной по времени от дуговой координаты и при
𝑉 > 0указывает на движение точки в сторону увеличения дуговой координаты, а при 𝑉 < 0 – в сторону уменьшения дуговой координаты
4. Ускорение точки. Ускорение точки определяется как векторная производная по времени от вектора скорости точки. Т.е., это вектор, направленный по касательной к годографу вектора скорости, расположенный в касательной плоскости, поскольку эту плоскость образуют касательные в точках М и М1 при 𝑴 → 𝑴𝟏. Ускорением точки называют меру изменения ее скорости, равную производной по времени от скорости этой точки или второй производной от радиус-вектора точки по времени. Ускорение характеризует изменение вектора скорости по величине и направлению и направлено в сторону вогнутости траектории.
5.Определение скорости и ускорения точки при координатном способе задания движения. При координатном способе задания движения точки модуль и направление скорости находят через проекции ее на оси координат, согласно следующей теореме: проекции скорости точки на неподвижные оси равны первым производным от соответствующих координат точки по времени:
Проекции ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени.
6.Естественная система координат. Естественные оси (касательная, главная нормаль, бинормаль) – это оси подвижной прямоугольной системы координат с началом в движущейся точке.
Их направление определяется траекторией движения.
7![]()
![]() .Определение
скорости и ускорения при естественном
способе задания движения.
Если
заданы траектория движущейся точки и
закон ее движения по этой траектории
.Определение
скорости и ускорения при естественном
способе задания движения.
Если
заданы траектория движущейся точки и
закон ее движения по этой траектории ![]() ,
то вектор скорости
направлен по касательной к
траектории, а его проекция на направление
касательной определяется по формуле
,
то вектор скорости
направлен по касательной к
траектории, а его проекция на направление
касательной определяется по формуле
причем
абсолютное значение этой проекции равно
модулю скорости, т. е. Вектор ускорения определяется
по его проекциям на естественные оси
(касательную,
главную нормаль и бинормаль):
![]() где
где ![]() — радиус кривизны траектории
в данной точке.
— радиус кривизны траектории
в данной точке.
8.Поступательное движение твердого тела. Поступательным движением твердого тела называют такое его движение, в котором любая прямая, проведенная в теле, остается все время параллельной самой себе. При поступательном движении твердого тела все точки описывают одинаковые траектории (см. рисунок выше) и в каждый момент времени имеют одинаковые скорости и ускорения. для изучения поступательного движения твердого тела достаточно изучить кинематику одной его точки.
9.Вращательное движение твердого тела. Вращательное движение – это движение твердого тела, имеющего как минимум две неподвижные точки
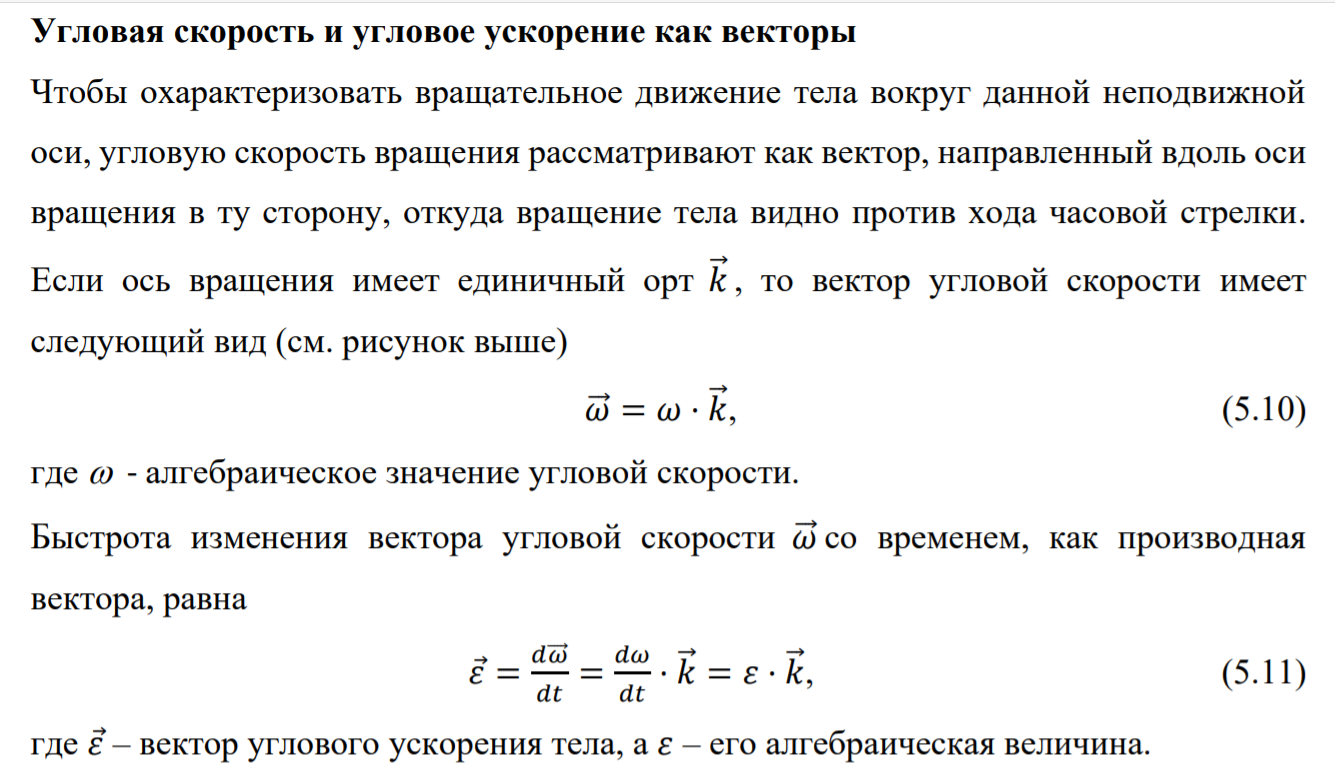
10. Вращение твердого тела вокруг неподвижной оси. Угловая скорость и угловое ускорение.
Вращением вокруг неподвижной оси называют такое движение тела, в котором
существуют как минимум две его точки, которые остаются все время
неподвижными Угловой скоростью ω называют быстроту изменения угла поворота тела со
временем. Угловая скорость вращательного движения тела равна производной по времени от угла поворота тела и является величиной алгебраической. Угловым ускорением ε во вращательном движении называют быстроту
изменения угловой скорости тела со временем Угловое ускорение равно производной по времени от угловой скорости или второй производной по времени от угла поворота тела.
11. Скорости и ускорения точек вращающегося твердого тела. Скорости точек тела во вращательном движении пропорциональны расстояниям до точек от оси вращения и направлены по касательной к траектории, то есть перпендикулярно к радиусам вращения.
Ускорение точки определяют по его составляющим: тангенциальному и нормальному
ускорениям: В ускоренном движении a⃗⃗τ направлено в ту же сторону, что и скорость точки, а в замедленном движении - в противоположную сторону.
12.Элементарный угол поворота, угловая скорость и угловое ускорение твердого тела как векторы.
13.Плоскопараллельное движение твердого тела. Определение скоростей точек в плоскопараллельном движении твердого тела. Плоскопараллельным или плоским движением твердого тела называют такое его движение, когда все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости. движение плоской фигуры в ее плоскости всегда можно разложить на два движения: 1)
поступательное движение, в котором все точки этой фигуры движутся так, как
любая точка этой фигуры, выбранная в качестве полюса, и 2) вращательное
движение фигуры вокруг этого полюса.
Скорости точек в каждый момент движения плоской фигуры можно определить так, как при вращении этой фигуры вокруг мгновенного центра скоростей.
14.Теорема о скоростях точек в плоскопараллельном движении твердого тела. Мгновенный центр скоростей. Скорость любой точки плоской фигуры при плоскопараллельном движении равна геометрической сумме скорости выбранного полюса и скорости точки во вращательном движении фигуры вокруг полюса. Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю.
В плоском движении, если ω ≠ 0, всегда существует точка, скорость которой в
данный момент времени равна нулю. Эту точку называют мгновенным центром
скоростей.
15.Определение ускорений точек в плоскопараллельном движении твердого тела. Мгновенный центр ускорений. При непоступательном движении плоской фигуры у нее в каждый момент времени имеется точка Q, ускорение которой равно нулю. Эта точка называется мгновенным центром, ускорений. 16.Сложное движение точки. Теорема о сложении скоростей. Сложным называют движение точки по отношению к двум или нескольким системам отсчета. Абсолютное движение – движение точки в неподвижной системе координат Oxyz.
Относительное движение – движение точки в подвижной системе координат Ax1y1z1.
Переносное движение – движение подвижной системы координат относительно неподвижной. Теорема (теорема о сложении скоростей). Абсолютная скорость точки равна геометрической сумме переносной и относительной скоростей:
17.Теорема о сложении ускорений. Ускорение Кориолиса. Теорема (теорема о сложении ускорений). Абсолютное ускорение точки равно
геометрической сумме переносного, относительного и Кориолисова ускорений: абсолютное ускорение при поступательном переносном движении равно геометрической сумме переносного и относительного ускорений:
ускорение Кориолиса возникает тогда, когда переносное движение является вращательным с угловой скоростью ω⃗⃗e ускорение Кориолиса – это геометрическая сумма быстроты дополнительного изменения относительной скорости за счет переносного вращения и быстроты дополнительного изменения переносной скорости за счет относительного перемещения точки в системе координат, которая вращается.
18.Аксиомы статики. Аксиомы статики – это основные законы и правила, которые применяют при преобразовании систем сил в эквивалентные системы.
1. Аксиома инерции (закон инерции Галилея)
Существуют такие системы отсчета, в которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и
равномерно. Такие системы отсчета называются инерциальными.
2. Аксиома равновесия двух сил
Две силы, приложенные к АТТ, являются уравновешенными тогда и только тогда,
когда они равны по модулю, направлены в противоположные стороны и их линии
действия совпадают.
3. Аксиома присоединения и исключения уравновешивающихся сил
Кинематическое состояние АТТ не изменится, если к действующей на него системе
сил прибавить или отнять уравновешенную систему сил.
Следствие аксиом 2 и 3
сила, приложенная к твердому телу, является скользящим вектором.
4. Аксиома параллелограмма сил
Две силы, приложенные к АТТ в одной точке, можно заменить их равнодействующей
силой, равной векторной сумме этих сил и приложенной к той же точке.
Верно и обратное. Любую силу можно разложить на две (и более) силы по правилу
векторной суммы (по правилу параллелограмма), приложенных в той же точке, что и
исходная сила. 6. Принцип отвердевания
Если ДТТ находится в равновесии, то его равновесие не нарушится, если его считать
АТТ.
7. Аксиома освобождаемости от связей
Материальные тела, ограничивающие движения материального объекта в
пространстве называют связями. Реакция связи – сила, с которой связь действует на
заданный материальный объект.
19.Связи и их реакции. Все то, что ограничивает перемещение данного тела, называют связью. Сила, с которой данная связь действует на тело, препятствующая тем или иным его перемещениям, называется реакцией связи. Реакция связи направлена в сторону противоположную той, куда связь не дает перемещаться телу. 1. Гладкая плоскость (поверхность) или опора Реакция N гладкой плоскости (поверхности) или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена к этой точке. 2. Гибкая нить (провода, канаты, цепи, ремни) Реакция Т направлена вдоль нити к точке подвеса. 3. Невесомый стержень с шарнирами Реакция N невесомого стержня направлена вдоль стержня. Обычнореакция N изображается от тела по стержню, в предположении, что в равновесии стержень растянут. 4. Неподвижный цилиндрический шарнир или подшипник Реакция RA цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси вращения, т. е. в плоскости Аху. Обычно ее раскладывают на две составляющие ХА и YA по двум взаимноперпендикулярным направлениям. 5. Шарнирно-подвижная опора (опора на катках) Реакция R проходит через ось шарнира и направлена перпендикулярно к опорной плоскости 6. Жесткая заделка Нахождение реакции жесткой заделки сводится к определению составляющих ХА и YA препятствующих линейному перемещению балки в плоскости действия сил, и алгебраической величине момента mA, препятствующего вращению балки под действием приложенных к ней сил.